Arduino PS2摇杆控制双sg90舵机
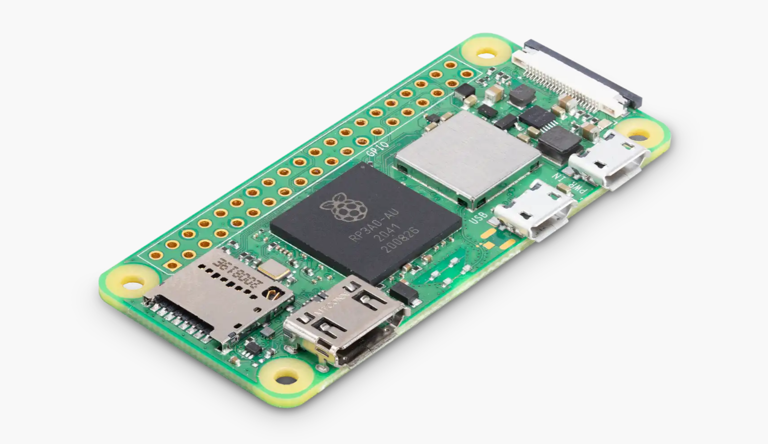
材料
摇杆模块x1
SG90 舵机x2
面包线
两轴云台(非必需)
代码
#include <Arduino.h>
#include <Servo.h> //引入lib
Servo myservo;
Servo my;//创建一个伺服电机对象
#define potpin A0
#define ppin A1//设定连接可变电阻的模拟引脚
int val;
int v;//创建变,储存从模拟端口读取的(0到102)
void setup()
{
myservo.attach(9);
my.attach(10); //9号引脚输出电机控制信号 注:仅能使用9、10号引脚
}
void loop()
{
val = analogRead(potpin);
v = analogRead(ppin);
//读取来自可变电阻的模拟值(0到1023之间)
val = map(val 0 1023 0 179);
v = map(v 0 1023 0 179); //利用"map"函数缩放该,得到伺服电机需要的角度(0到180之间)
myservo.write(val); //设置伺服电机的位置
delay(15);
my.write(v); //设置伺服电机的位置
delay(15); //等待电机旋转到目标角度
}
“Arduino PS2摇杆控制双sg90舵机” 的相关文章
[Download]资源名称:(不包含PE)Windows 12 by sun12文件大小:3.96G下载地址1:https://pan.baidu.com/s/1sWristlACMEpMcQz67zrww?pwd=szpv 下载地址2:…
编辑:梓文、张倩Stable Diffusion 能在树莓派上运行了!11 个月前 Stable Diffusion 诞生,它能够在消费级 GPU 上运行的消息让不少研究者备受鼓舞。不仅如此,苹果官方很快下场,将 Stable Diffus…
[摘要]多方消息显示,微软正在准备发布 "突破性 "的以人工智能为中心的新一代Windows版本,内部代号 "Hudson Valley "(哈德逊河谷)。 快科技12月10日消息,多方消息显示,微…
根据CQ9 Gaming发布的报告显示,2023年,iPhone在高端手机市场(零售价不低于600美元)的份额下降了4%,从75%降至71%。CQ9游戏试玩跳高高分析,这一降幅的主要原因在于华为回归5G市场以及三星折叠机的高销量。华为和三星…
Almost Human宣布的好消息让Switch玩家充满期待,经典迷宫探索RPG《魔岩山传说》将于1月15日正式登陆Switch平台。这款2012年首发的CQ9APP经典游戏汇聚了探索、生存、战斗、魔法、解谜和角色扮演等元素,为玩家带来了…
Asobo Studio与Focus Home Interactive合作推出的《瘟疫传说:无罪》(A Plague Tale: Innocence)是一部于2019年问世的精彩电子游戏。游戏以14世纪法国黑死病的背景为舞台,讲述了年轻的艾…